OpenCV-Python 实现两张图片自动拼接成全景图
背景介绍
图片的全景拼接如今已不再稀奇,现在的智能摄像机和手机摄像头基本都带有图片自动全景拼接的功能,但是一般都会要求拍摄者保持设备的平稳以及单方向的移动取景以实现较好的拼接结果。这是因为拼接的图片之间必须要有相似的区域以保证拼接结果的准确性和完整性。本文主要简单描述如何用 Python 和 OpenCV 库实现两张图片的自动拼合,首先简单介绍一下两张图片拼接的原理。
基本原理
要实现两张图片的简单拼接,其实只需找出两张图片中相似的点 (至少四个,因为 homography 矩阵的计算需要至少四个点), 计算一张图片可以变换到另一张图片的变换矩阵 (homography 单应性矩阵),用这个矩阵把那张图片变换后放到另一张图片相应的位置 ( 就是相当于把两张图片中定好的四个相似的点給重合在一起)。如此,就可以实现简单的全景拼接。当然,因为拼合之后图片会重叠在一起,所以需要重新计算图片重叠部分的像素值,否则结果会很难看。所以总结起来其实就两个步骤:
1. 找两张图片中相似的点,计算变换矩阵
2. 变换一张图片放到另一张图片合适的位置,并计算重叠区域新的像素值 (这里就是图片融合所需要采取的策略)
具体实现
寻找相似点
当然,我们可以手动的寻找相似的点,但是这样比较麻烦。因为相似点越多或者相似点对应的位置越准确,所得的结果就越好,但是人的肉眼所找的位置总是有误差的,而且找出很多的点也不是一件容易的事。所以就有聪明的人设计了自动寻找相似点的算法,这里我们就用了 SIFT 算法,而 OpenCV 也给我们提供 SIFT 算法的接口,所以我们就不需要自己费力去实现了。如下是两张测试图片的原图和找出相似点后的图片。


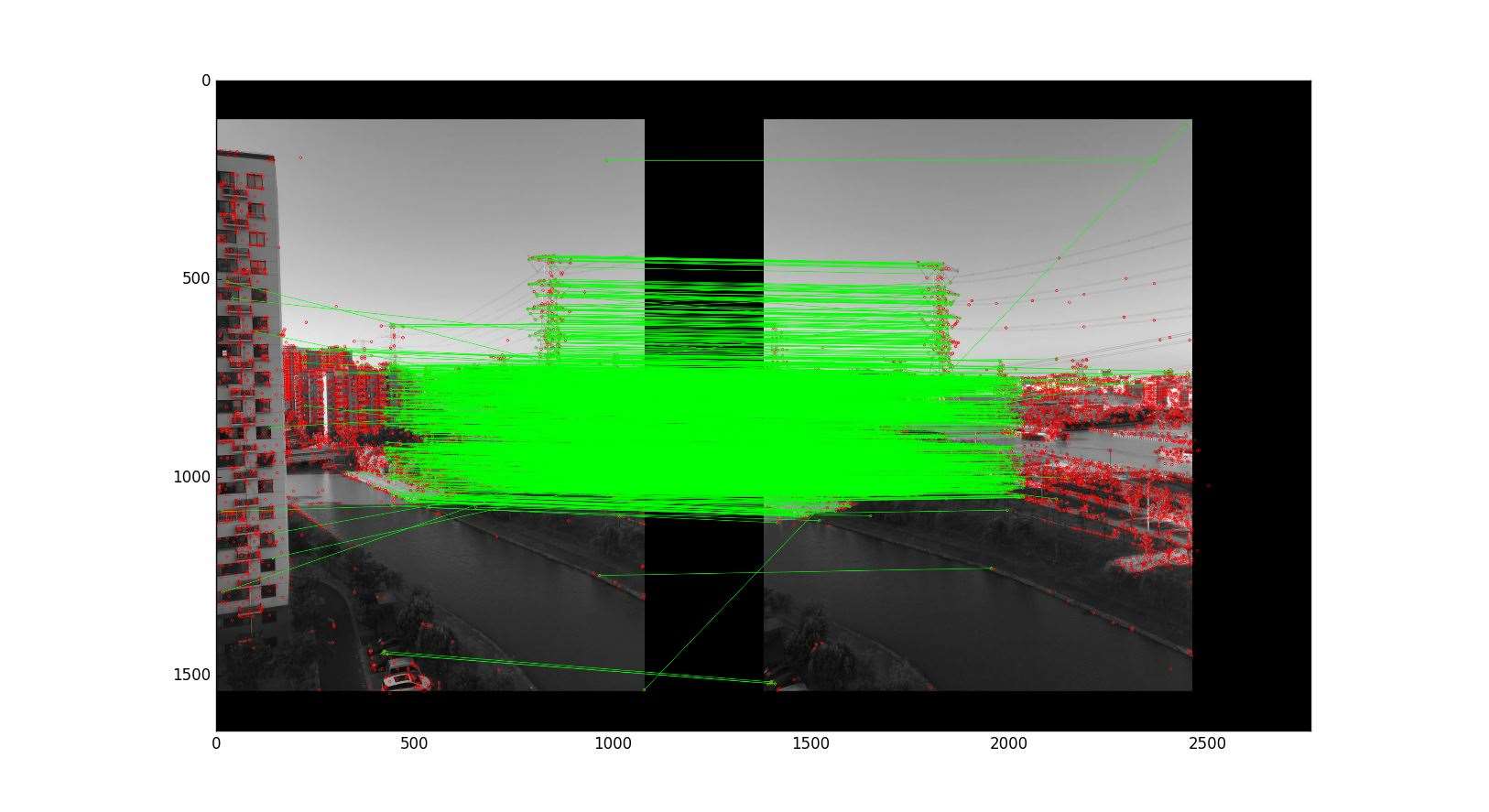
其中红色的点是 SIFT 算法找出的相似点,而绿色的线表示的是在所有找出的相似的点中所筛选出的可信度更高的相似的点。因为算法找出的相似点并不一定是百分百正确的。然后就可以根据这些筛选出的相似点计算变换矩阵,当然 OpenCV 也提供了相应的接口方便我们的计算,而具体的代码实现也可以在 OpenCV 的 Python tutorial 中找到 [1]。
图片拼接
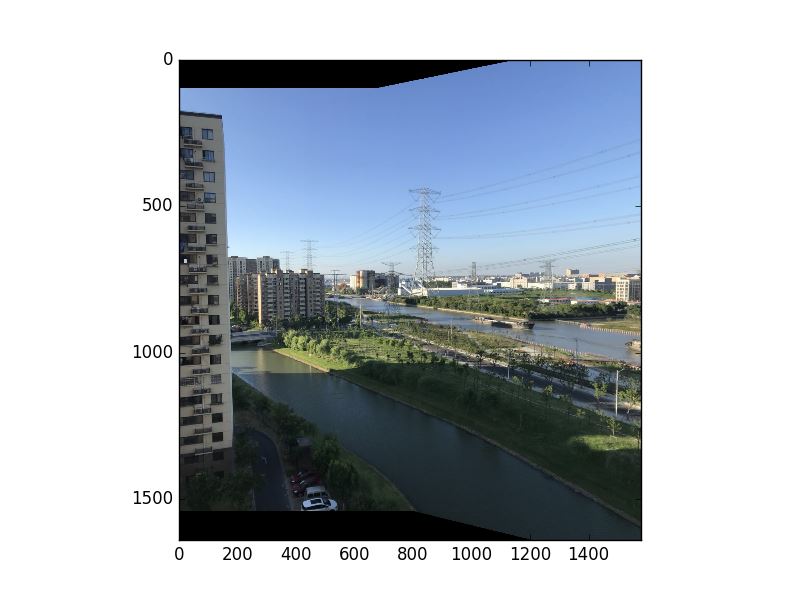
计算出变换矩阵后,接下来就是第二步,用计算出的变换矩阵对其中一张图做变换,然后把变换的图片与另一张图片重叠在一起,并重新计算重叠区域新的像素值。对于计算重叠区域的像素值,其实可以有多种方法去实现一个好的融合效果,这里就用最简单粗暴的但效果也不错的方式。直白来说就是实现一个图像的线性渐变,对于重叠的区域,靠近左边的部分,让左边图像内容显示的多一些,靠近右边的部分,让右边图像的内容显示的多一些。用公式表示就是,假设 alpha 表示像素点横坐标到左右重叠区域边界横坐标的距离,新的像素值就为 newpixel = 左图像素值 × (1 - alpha) + 右图像素值 × alpha 。这样就可以实现一个简单的融合效果,如果想实现更复杂或更好的效果,可以去搜索和尝试一下 multi-band 融合,这里就不过多赘述了。最后附上实现的结果和代码,可供参考。
Python 代码如下:
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
if __name__ == '__main__':
top, bot, left, right = 100, 100, 0, 500
img1 = cv.imread('test1.jpg')
img2 = cv.imread('test2.jpg')
srcImg = cv.copyMakeBorder(img1, top, bot, left, right, cv.BORDER_CONSTANT, value=(0, 0, 0))
testImg = cv.copyMakeBorder(img2, top, bot, left, right, cv.BORDER_CONSTANT, value=(0, 0, 0))
img1gray = cv.cvtColor(srcImg, cv.COLOR_BGR2GRAY)
img2gray = cv.cvtColor(testImg, cv.COLOR_BGR2GRAY)
sift = cv.xfeatures2d_SIFT().create()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1gray, None)
kp2, des2 = sift.detectAndCompute(img2gray, None)
# FLANN parameters
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50)
flann = cv.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1, des2, k=2)
# Need to draw only good matches, so create a mask
matchesMask = [[0, 0] for i in range(len(matches))]
good = []
pts1 = []
pts2 = []
# ratio test as per Lowe's paper
for i, (m, n) in enumerate(matches):
if m.distance < 0.7*n.distance:
good.append(m)
pts2.append(kp2[m.trainIdx].pt)
pts1.append(kp1[m.queryIdx].pt)
matchesMask[i] = [1, 0]
draw_params = dict(matchColor=(0, 255, 0),
singlePointColor=(255, 0, 0),
matchesMask=matchesMask,
flags=0)
img3 = cv.drawMatchesKnn(img1gray, kp1, img2gray, kp2, matches, None, **draw_params)
plt.imshow(img3, ), plt.show()
rows, cols = srcImg.shape[:2]
MIN_MATCH_COUNT = 10
if len(good) > MIN_MATCH_COUNT:
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)
M, mask = cv.findHomography(src_pts, dst_pts, cv.RANSAC, 5.0)
warpImg = cv.warpPerspective(testImg, np.array(M), (testImg.shape[1], testImg.shape[0]), flags=cv.WARP_INVERSE_MAP)
for col in range(0, cols):
if srcImg[:, col].any() and warpImg[:, col].any():
left = col
break
for col in range(cols-1, 0, -1):
if srcImg[:, col].any() and warpImg[:, col].any():
right = col
break
res = np.zeros([rows, cols, 3], np.uint8)
for row in range(0, rows):
for col in range(0, cols):
if not srcImg[row, col].any():
res[row, col] = warpImg[row, col]
elif not warpImg[row, col].any():
res[row, col] = srcImg[row, col]
else:
srcImgLen = float(abs(col - left))
testImgLen = float(abs(col - right))
alpha = srcImgLen / (srcImgLen + testImgLen)
res[row, col] = np.clip(srcImg[row, col] * (1-alpha) + warpImg[row, col] * alpha, 0, 255)
# opencv is bgr, matplotlib is rgb
res = cv.cvtColor(res, cv.COLOR_BGR2RGB)
# show the result
plt.figure()
plt.imshow(res)
plt.show()
else:
print("Not enough matches are found - {}/{}".format(len(good), MIN_MATCH_COUNT))
matchesMask = None
Reference
[1] OpenCV tutorial: https://docs.opencv.org/3.4.1/d1/de0/tutorial_py_feature_homography.html
到此这篇关于OpenCV-Python 实现两张图片自动拼接成全景图的文章就介绍到这了,更多相关OpenCV 图片自动拼接成全景图内容请搜索本站以前的文章或继续浏览下面的相关文章希望大家以后多多支持本站!
版权声明:本站文章来源标注为YINGSOO的内容版权均为本站所有,欢迎引用、转载,请保持原文完整并注明来源及原文链接。禁止复制或仿造本网站,禁止在非www.yingsoo.com所属的服务器上建立镜像,否则将依法追究法律责任。本站部分内容来源于网友推荐、互联网收集整理而来,仅供学习参考,不代表本站立场,如有内容涉嫌侵权,请联系alex-e#qq.com处理。
 关注官方微信
关注官方微信